1
Physiology
Dr. Basim Mohamad Alwan Lecture (4)
SOMATIC
SENSATIONS
Somatic sensations are sensations which are conducted by the somatic
nerves and come to conscious perception. Testing of all sensations should
be:
(a) Bilateral, symmetric and systematic.
(b) By using the same strength of stimulation.
(c) Including all dermatomes.
(d) Testing are performed while the eyes are closed to eliminate the
effect of vision on recognizing the sensation under test.
Somatic sensations are classified into three categories:
[I] MECHANORECEPT1VE SENSATIONS
These are sensations produced by mechanical stimuli. They include
senses of touch, texture of material, vibration, pressure, stereognosis,
muscle tension and proprioception.
[II] THERMORECEPTIVE SENSATIONS
These are sensations produced by thermal stimuli. They include warmth
and cold sensations.
[III] PAIN SENSATION
These are produced by noxious stimuli
MECHANORECEPTIVE SENSATIONS
These sensations produced by mechanical stimuli which stimulate
mechanoreceptors. It is a group of sensations which comprises several
sensory modalities.
MECHANORECEPTORS
Mechanoreceptors are receptors which are especially sensitive to
mechanical stimuli. They are classified into cutaneous and deep
mechanoreceptors as follows:
1. CUTANEOUS MECHANORECEPTORS
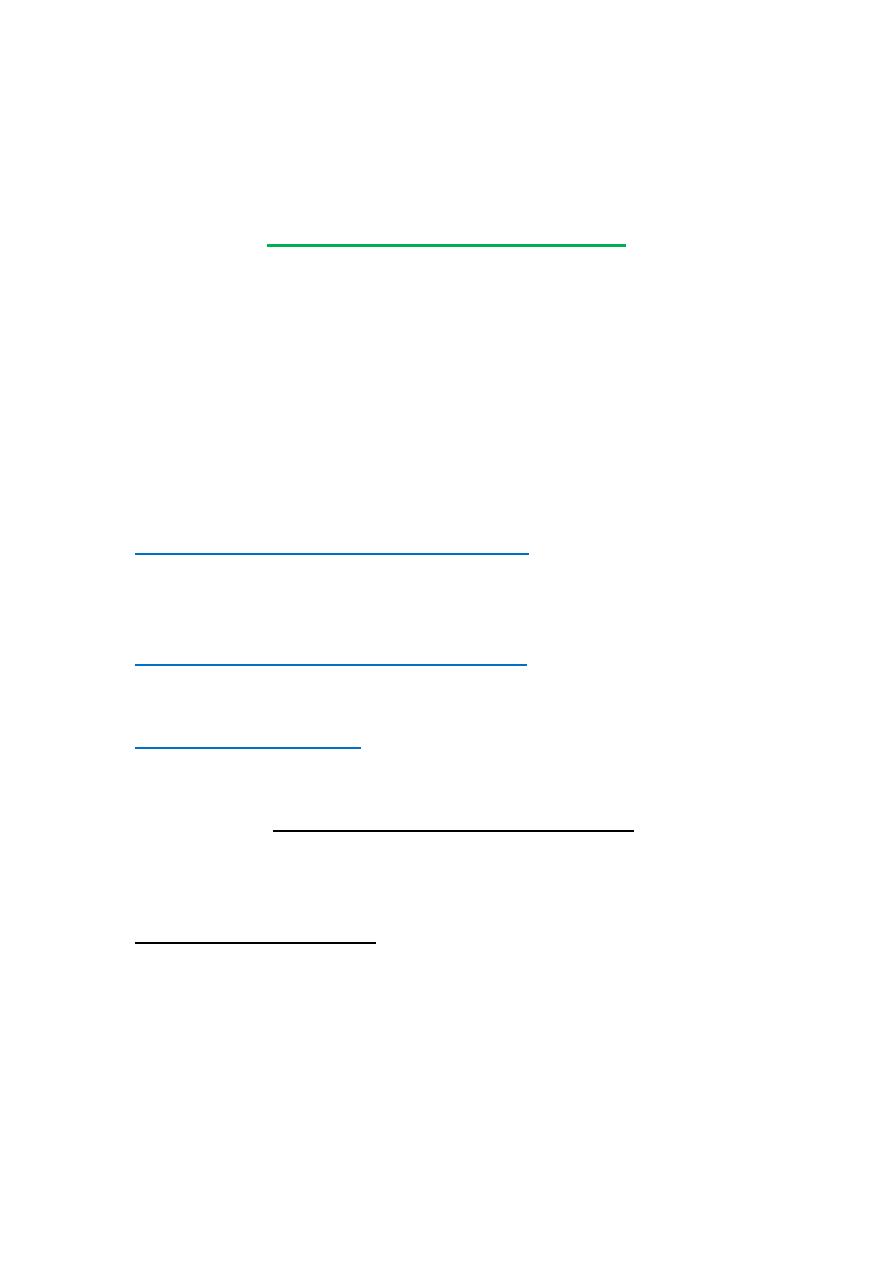
They are of three types (Fig. 4-1):
i. Naked nerve endings; The free nerve endings and the basket endings
around hair follicles.
2
ii. Expanded nerve endings; Merkel discs and Ruffini corpuscles.
iii. Encapsulated nerve endings; Pacinian corpuscles and Meissner
corpuscles.
Figure 4 - 1: Cutaneous mechanoreceptors
These receptors differ in their excitability, rate of adaptation, and the
ability to respond to repetitive stimuli. They are present in the skin all
over the body, but highly condensed in the finger tips, lips and other areas
which are highly sensitive to touch.
[II] DEEP MECHANORSCEPTORS
These receptors are of two types:
i. Muscle spindles: which are stretch receptors found in the fleshy part of
skeletal muscles?
ii. Golgi tendon organs: which are tension receptors found in the
tendons of the skeletal muscles.
MECHANORECEPTIVE SENSATIONS
1. TOUCH OR TACTILE SENSATION
Touch is the cutaneous sensation produced by light mechanical stimuli.
There are two types of touch sensation either crude or fine touch.
3
(A) CRUDE TOUGH
This is touch sensation without accurate identification of the locality or
the number of stimuli and it is of two types:
a. Tickle; is a sensation produced by mild tactile stimulation of certain
areas of skin, usually leading to reflex involuntary laughter.
b. Itch; is a sensation of skin irritation which leads to the desire for
scratching of the skin (the scratch reflex). It is produced by either a
moving tactile stimulus a moving flea or by substances released in the
skin as histamine.
The receptors for tickle and itch sensation are specialized, highly
sensitive, rapidly adapting free naked nerve endings. They are found
exclusively in the superficial layers of the skin. Tickle and itch signals are
transmitted by the slowly conducting type IV nerve fibers.
Scratching relieves itch by removing the irritating stimulus and by
presynaptic lateral inhibition of the central terminals of the primary itching
conducting fibers. Nerve fibers carrying scratch signals send collaterals
inside the spinal cord to inhibit fibers of itch sensation by presynaptic
inhibition mechanism. So, scratch conducting fibers inhibit the itch
conducting fibers by lateral presynaptic inhibition.
(B) FINE TOUCH
This is touch sensation with accurate identification of the locality and the
number of stimuli. Fine touch sensation are classified into:
a. TACTILE LOCALIZATION (Topgnosis)
It is the ability to identify the point where the stimulus is applied. It is
tested by touching the skin of blind-folded subject by the tip of a blunt-
pointed object, then asking the subject to open his eyes and point out the
site where he was touched. The acuity of this sense is inversely
proportionate to the distance of error in localizing the stimulus.
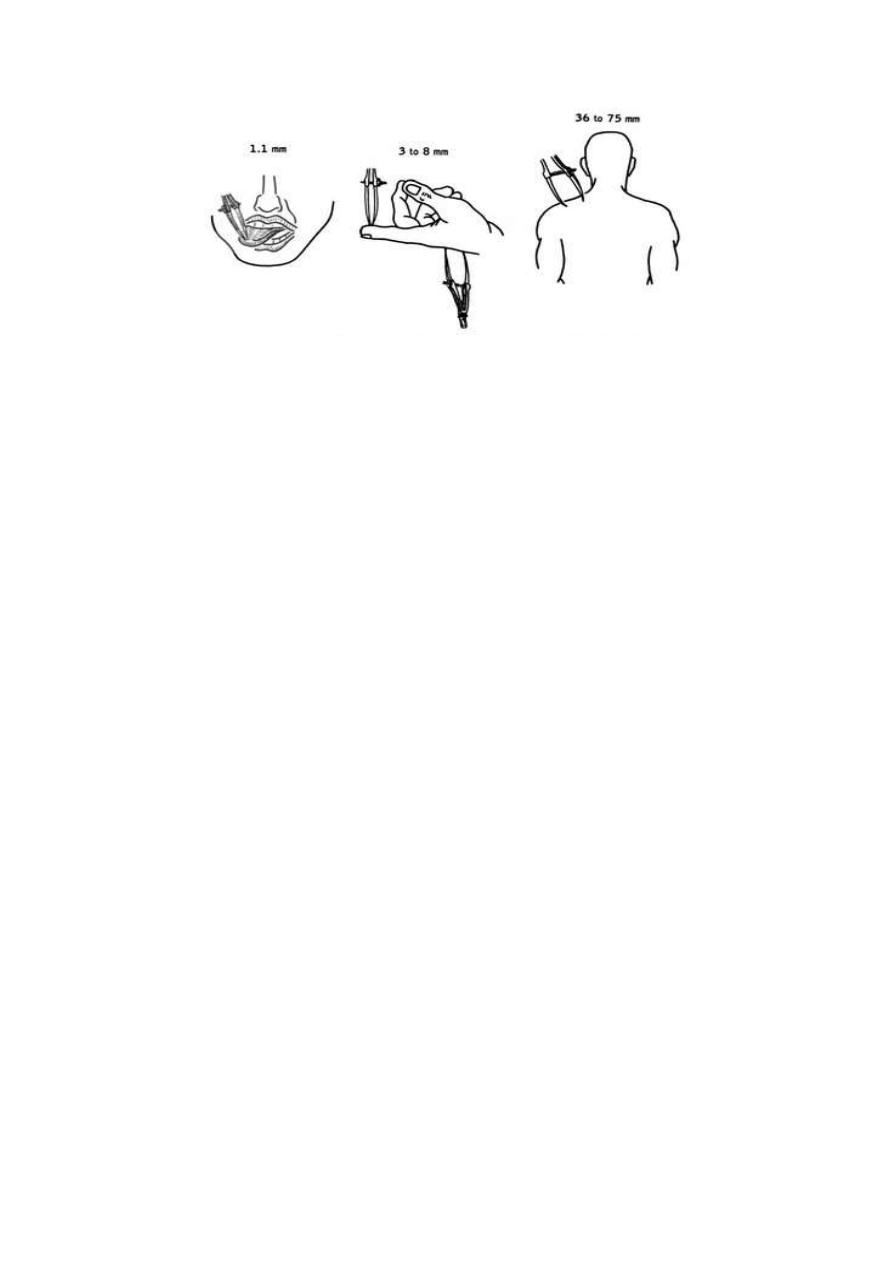
b. TACTILE DISCRIMINATION
It is the ability to identify two tactile stimuli applied simultaneously as two
separate points of contact. It is tested by the compass test or using
discriminator. The two blunt ends of test compass are applied to the skin
of a blind-folded subject. The distance between the two ends of the compass
is increased step by step until the subject feels the two ends of the compass
as two separate points. Acuity of this sensation is inversely proportionate to

4
the two-point threshold which is the minimal distance at which the two
stimuli are felt as two separate points.
Figure 4-2: Two-point discrimination; the compasses or discriminator test
Tactile discrimination is not equally developed in different parts of the
skin (Fig. 4-2). It is highly developed in the tips of the fingers and tongue
(two-point threshold = 2-3 mm) but poorly developed on the back of the
trunk (threshold = 65 mm). This sensation is conducted by the gracile
and cuneate pathway.
5
For two-point discrimination to occur, impulses from the two points on
the skin should reach two separate final sensory neurons in the sensory
cerebral cortex. Accordingly, three conditions which favor the
development of high degree of tactile discrimination in a skin area.
i. High density of touch receptors.
ii. Minimal convergence in the sensory pathway.
iii. Large area of sensory cortical representation in the sensory
cortex; i.e. a large number of final sensory neurons.
These conditions are all found in the skin of the lips and fingertips.
c. TEXTURE OF MATERIAL SENSATION
This is the ability to identify the substance from which a textile is made;
e.g. silk, wool, cotton, synthetic material ...etc., by touching and without
seeing it. It is a special type of fine touch sensation which is conducted by
the gracile and cuneate pathway.
d. VIBRATION SENSE
This is a flickering (repetitive) tactile sensation. There are two types of
vibration receptors; the high frequency, rapidly adapting Pacinian
corpuscles which respond to vibration frequency up to 800 Hz, and the
low frequency, slowly adapting Meissner corpuscles which respond to
vibration frequency up to 80 Hz.
Vibration sense is tested by putting the base of a vibrating tuning fork on
the skin. A sense of buzzing or thrill is felt. The tuning fork is usually put
on a subcutaneous bony prominence just to magnify the vibrations. Bone
itself is insensitive to vibrations.
Vibration sense is conducted by the gracile and cuneate pathway. In
cases of uncontrolled diabetes mellitus or pernicious anemia,
degeneration of the dorsal column occurs. An early sign of this

6
degeneration is decreased sensitivity or disappearance of the vibration
sense.
2. PRESSURE SENSATION
This is the sensation produced by a strong, blunt, static mechanical
stimulus. There are two types of pressure receptors: the rapidly adapting
Pacinian corpuscles, and the slowly adapting Ruffini endings.
Pressure sensation may be divided according to the intensity of the
mechanical stimulus into two types either Light pressure (pressure
touch) sensed by cutaneous receptors or Deep pressure sensed by
receptors in deeper structures as fasciae and connective tissues.
The acuity of pressure sensation is tested by applying different weights on
a supported hand of a blind-folded subject, then, the subject is asked to
identify which weight is heavier and which is lighter.
Like touch sensation, there are two types of pressure sensation:
A. CRUDE PRESSURE SENSATION
This is pressure sensation with low ability to discriminate different
weights. This sensation is conducted by the anterolateral pathway.
B. FINE PRESSURE SENSATION
This is pressure sensation with high ability to discriminate different
weights. This sensation is conducted by the gracile and cuneate pathway.
STEREOGNOSIS
This is special type of sensation which is defined as the ability to identify
objects by handling them without seeing them (a key, a coin). This ability
depends on touch and pressure sensations as well as the cortical
sensory somatic association area of the parietal lobe. This sensation is
conducted by the gracile and cuneate pathway.
7
3. MUSCLE TENSION SENSATION
This is the sensation produced by traction on muscle tendons. The
receptors are the Golgi tendon organs. It enables the person to
discriminate different weights by lifting them. It is tested by applying
different weights on an unsupported hand of a blind-folded subject, then,
the subject is asked to identify the lighter and the heavier weight.
4. PROPRIOCEPTIVE SENSATIONS
Proprioception is the sensation of the position of different parts of the
body relative to each other and the position of the body in space.
Proprioception is divided into two types:
(A) STATIC PROPRIOCEPTION
(SENSE OF POSITION)
Static proprioception is the sense of the position of different parts of the
body relative to each other. The receptors are the deep mechanoreceptors
(muscle spindles and Golgi tendon organs). It is tested by putting a
limb in an unusual position and asking the blind-folded subject to put the
other limb in a similar position.
(B) DYNAMIC PROPRIOCEPTIO (
SENSE OF MOVEMENT)
Dynamic proprioception
(KINESTHETIC SENSATION)
is the sense of
movement of joints. The receptors are the Pacinian corpuscles and
Golgi tendon organs in ligaments and synovial membranes of joints.
This sense is tested by moving a joint and the blind-folded subject is
asked to tell when the movement begins and when it stops or when the
rate of movement changes.
THERMORECEPTIVE SENSATIONS
Thermoreceptive sensations are those of warmth and cold. There are
two types of specialized thermoreceptors, one is sensitive to warmth and
the other is sensitive to cold.
Thermoreceptors are found in the base of the epidermal layer of the
skin. There are warmth sensitive spots on the skin where there are
warmth receptors only and cold sensitive spots where there are cold
receptors only. The number of cold spots on the skin is (4-10) times as
many as those of the warmth spots. The highest density of
8
thermoreceptors is found in the skin of the face and hands.
Thermoreceptors are also found in the abdominal viscera, the spinal cord
and around great veins. These receptors are concerned mainly with
informing the hypothalamic thermostat of any increase in the body core
temperature. They do not give rise to warmth or cold sensations.
Cutaneous thermoreceptors monitor the temperature of the skin, not that
of the body. An alcoholic drink in cold weather gives a sense of warmth
mainly because it causes cutaneous vasodilation leading to warming of
the skin. In this case, the sense of warmth reflects an increase in the
temperature of the skin, not that of the body. The body temperature might
even decrease because of the excessive heat loss from the skin.
THERMORECEPTORS
There are two types of thermoreceptors:
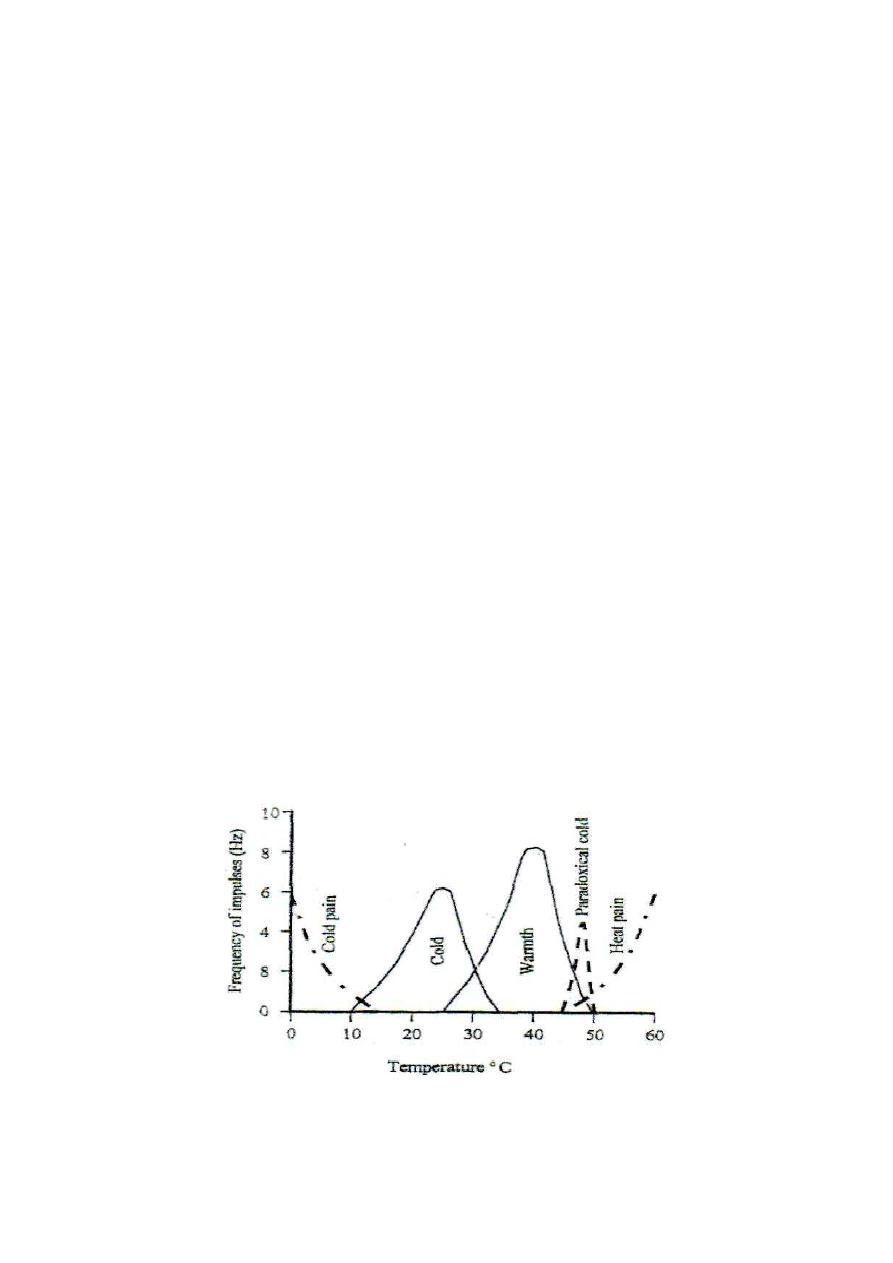
1. WARMTH RECEPTORS
Warmth receptors are specialized free nerve endings. They are stimulated at
temperatures between 25-50
o
C with maximum frequency of discharge at
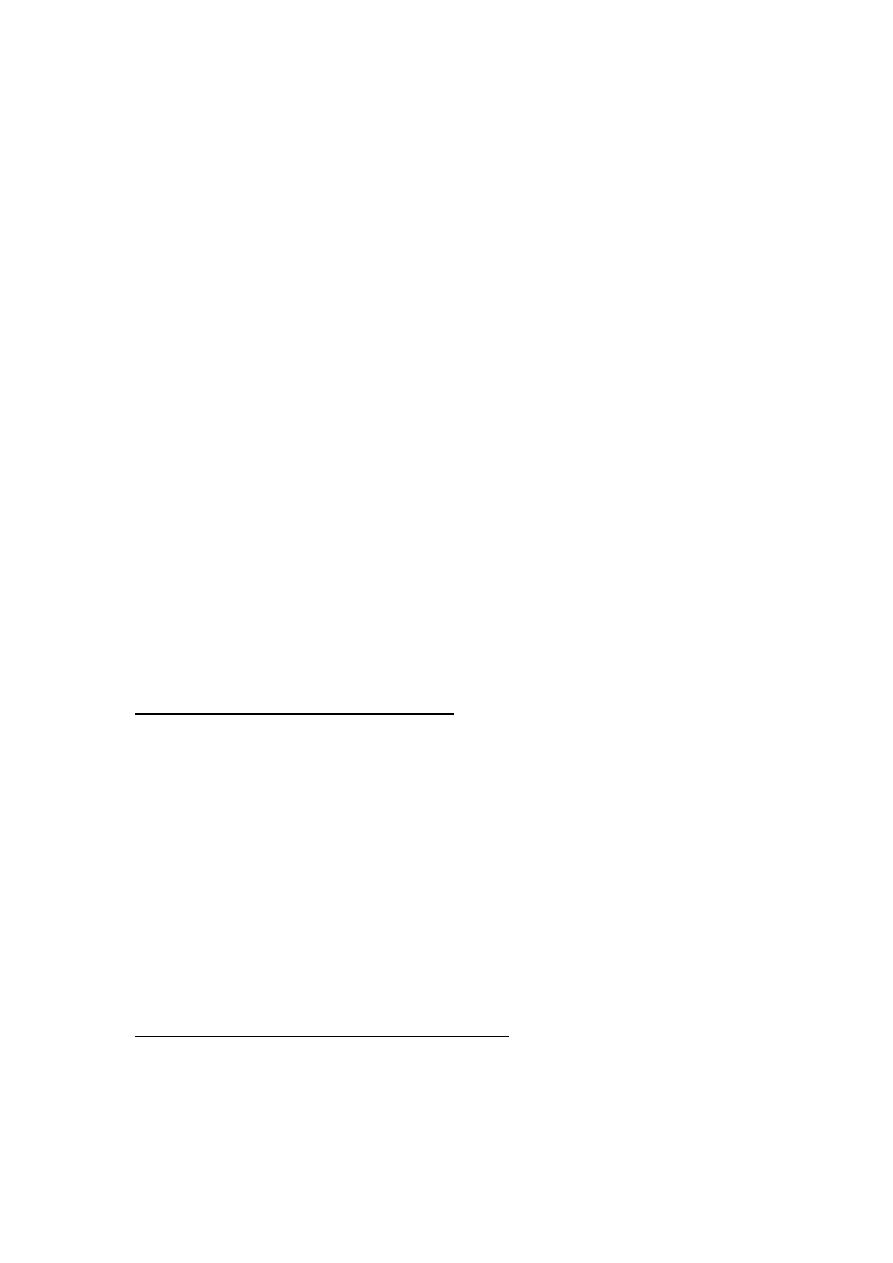
about 40°C (Fig. 4-3). At temperatures lower than 40
o
C the frequency of
discharge decreases and the discharged impulses take the separated impulses
pattern (ungrouped pattern). At temperatures higher than 40°C, the
frequency decreases and the discharged impulses take a grouped
pattern, "volley pattern" (Fig. 4-5). Warmth sensation is conducted by
the thin, type IV fibers.
Figure 7-3: The frequency of discharge from thermoreceptors and
thermal pain receptors at different temperatures.
9
2. COLD RECEPTORS
Cold receptors are the Krause end-bulbs which are specialized,
encapsulated nerve endings (Fig. 4-4). They are stimulated at
temperatures between 10-35°C with maximum frequency of discharge at
about 25°C (Fig. 7-3). At temperatures lower than 25°C, the frequency of
discharge decreases and the discharged impulses take the grouped
pattern (volley pattern).
Figure 4 - 4: Krause end bulb.
At temperatures higher than 25°C, the frequency of discharge decreases
and the discharged impulses take the ungrouped pattern. Cold sensation
is transmitted by type III nerve fibers.
Figure 4-5: The change in
frequency and pattern of discharge from
thermoreceptors with the change of temperature
11
Thermoreceptors adapt at temperatures between 20-40°C, giving a feeling
of thermeneutrality, but no adaptation occurs outside this range. At
temperatures below 15
o
C or above 45°C, thermosensitive pain receptors
are activated giving rise to pain sensation (cold pain and heat pain). Pain
sensation at temperature ranges of 10-15 and 45-50 is very mild and
masked by the senses of extreme cold or extreme warmth respectively.
The sense of thermal pain is clearly perceived at temperatures below 10
or above 50 °C.
STIMULATION OF THERMORECEPTORS
The effectiveness of a stimulus applied to thermoreceptors depends on
two factors:
1. The absolute temperature: In the temperature range of 10 - 50°C,
anything warmer than the skin is felt warm and anything colder than the
skin is felt cold.
2. The rate of change of temperature; i.e. the rate of warming or
cooling. A rapidly changing temperature (rising or falling) is much more
effective stimulant to thermoreceptors than a slowly changing or a steady
temperature.
PARADOXICAL COLD SENSATION
Rapid warming of the skin to temperatures between 45-50
o
C gives a
transient false sense of cold (paradoxical cold sensation). This is
because at this temperature range, cold receptors are transiently
stimulated. Paradoxical cold, like any cold sensation, produces reflex
vasoconstriction and rise in arterial blood pressure (the cold pressor
effect).
Hot water showers are not recommended for cardiac patients because they
may give a sense of cold and then cold pressor effect which lead to rise in arterial
blood pressure and increase in the work load on the heart and heart failure.
NONSPECIFIC THERMORECEPTORS
Some pressure receptors (Ruffini endings) are stimulated also by cold.
This explains why a colder of two otherwise identical weights placed on
the hand is felt heavier than the warmer weight (Weber's illusion). This is

11
because the colder weight is a stronger stimulant of pressure receptors
than the warmer weight because it makes double stimulation of Ruffini
pressure receptors, first by its weight, and second by its coldness